Ползать — значит ходить
С библейских времен принято считать, что Бог проклял гадов, заставив их ползать и пресмыкаться. Те же, у кого есть ноги, намного выше эволюционно. Так думает большинство человечества. Математическая же формализация способов перемещения роботов, копирующих известные в природе методы локомоции, остается непаханым полем для исследователей.
Недавно в печати появилась статья, посвященная новой универсальной модели передвижения роботов. Она написана разработчиками роботов из Мичиганского университета под руководством доктора Дэна Жао (Dan Zhao) с факультета механической инженерии. Работу курировал профессор электрической и компьютерной инженерии Шей Ревзен (Shai Revzen).
В исследовании показано, что скользящие змеи, плывущие в жидкости микробы, двигающиеся в песке ящерицы, извивающиеся черви, бегающие пауки и многоножки, гуляющие лошади и пр. с точки зрения механики подчиняются единой математике. Оказалось, что эволюция от ползания к ходьбе неперывна, резкой границы между ними не существует.
Доктор Жао говорит, что, даже если робот скользит, его скорость остается пропорциональной перемещению тела. Это так называемый кинематический режим. Говоря физическим языком, модель описывает премещение объекта в вязкой, так называемой стоксовой жидкости. Закономерности плавания с трением о среду оказались теми же, что и закономерности передвижения многоножек. Такое движение возможно в широком дипазоне параметров. Сколжение ног может быть как постоянным (100% времени движения), так и редким (5%), что характерно, например, для аргентинского муравья.
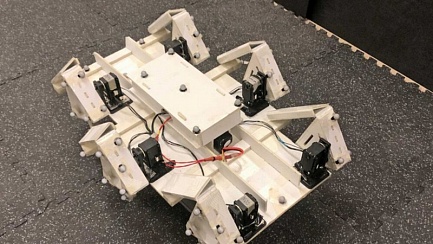
Ученые говорят, что если бы робот был разумным, то он испытывал бы ощущения человека, плывущего в меду. Ноги робота при этом двигаются в вязкой среде или скользят, но не приклеиваюся к ней. Для проверки своих выводов команда построила шестиногого робота, названного Большим Муравьем.
Результаты работы, по мнению авторов, открывают инженерам новые возможности и способны изменить методы программирования многоногих роботов. Модель, например, облегчает расчеты конструкций космических роверов и программирование систем их управления. Профессор Ревзен, который основные свои исследования посвятил перемещению тараканов, отмечает, что из-за сложности расчетов среди роверов пока преобладают четвероногие конструкции.
Благодаря этому исследованию эволюционные биологи получили еще одно подтверждение того, что все живые создания на планете произошли от похожего на червя существа, две половинки которого были зеркальными отражениями друг друга. Математика подтверждает, что относительное перемещение двух его частей позволяло ему и передвигаться в воде, и выбираться на сушу.
Дети также начинают свой путь по планете, ползая на четвереньках при постоянном контакте трех точек с полом. По мнению математиков, альтернативный режим бега на двух или четырех ногах, парения или полета возник позже плавания и ходьбы.
Proceedings of the National Academy of Sciences, 119, 37, 2022