ИИ учит язык
Для управления роботами инженеры применяют современную микроэлектронику, оснащенную сложными программами. Все чаще эти программы интеллектуальны, то есть обучаемы. Поэтому снабженные ИИ роботы способны приобретать собственный «трудовой» опыт. Если же есть группа одинаковых роботов, то смена их программ на софт самого опытного позволит передать его навыки всем.
У людей передаче знаний служит еще и язык. Текст на нем позволяет делиться опытом даже опосредованно, не вступая в контакт с контрагентами. Возможно ли это с роботами?
На этот вопрос ответила группа ученых инженерной школы Принстонского университета. Под руководством его профессоров Анирудха Маджумдара (Anirudha Majumdar) и Картика Нарасимхана (Karthik Narasimhan) она провела эксперименты по текстовому обучению робота-руки, вернее идентичной ему компьютерной модели. Результаты работы были представлены 14 декабря прошлого года на научной конференции по обучению роботов.
Выбор модели для обучения не случаен. Роботизированные руки находят применения в самых разных отраслях промышленности, но обучать их оптимальным действиям очень сложно. Предметы и инструменты, которыми они пользуются, очень разнятся по форме, материалам и свойствам поверхности. Да и зрение, и осязание роботов сильно отличаются от человеческих.
В качестве языкового источника информации для манипулятора инженеры взяли описания инструментов, которые генерирует лингвистическая модель GPT-3 на основе данных Интернета, появившаяся в открытом доступе в 2020 году.
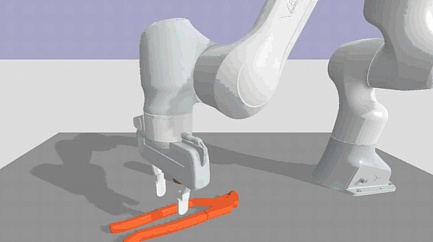
Робототехники остановились на одном оптимальном тексте запроса о форме и назначении разных инструментов. Инженеры получили описания 27 предметов, от топора до скребка. Манипулятору давали четыре разных задания: толкать инструмент, поднять его, использовать его для перемещения цилиндра по столу или забивания стержня в отверстие. Половину экспериментов по обучению робота исследователи проводили без лингвистической информации, а затем сравнивали результаты.
В большинстве случаев текстовая информация давала роботу-руке значительные преимущества. Показательный пример — перемещение цилиндра или бутылки небольшим монтировочным ломиком. После получения его текстового описания робот умел брать его за длинный прямой конец, а для лучшего захвата предмета использовать изогнутый. Без описания робот держал монтировку у изогнутого конца, поэтому выполнял задачу менее успешно. Таким образом, робот учился не только использовать инструменты, но и понимать описания приборов. То есть благополучно осваивал английский язык.
Результаты экспериментов впервые показывают, как языковая информация при тренировке ИИ помогает адаптировать автономного робота к новой ситуации и ускорить его обучение. Видимо скоро мы сможем покупать в магазинах домашних помощников с девственно чистыми мозгами. А затем обучать их под свои нужды с помощью текстов и даже голоса. Конечно, если нам удастся непротиворечиво формулировать свои мысли. Военные могут представить себе механических тараканов, подслушивающих разговоры во вражеских генштабах и автономно принимающих решения об уничтожении на месте ключевых вражеских фигур.
Исследование дает начало новому направлению, приложения которого безграничны. Ну а пока, помимо Национального научного фонда, его финансируют автомобильная компания Тойота и исследовательский отдел ВМФ США.