Синергия простых мозгов
Биологи давно стали подозревать, что от поведения отдельного представителя коллективных насекомых, к примеру, термитов или пчел, мало зависят действия их групп. Так муравьи по отдельности мало на что способны, но их организованная толпа может решать труднейшие, с людской точки зрения, задачи — обеспечивать муравейник пищей, защищать его, строить сложные сооружения.
Группа ученых во главе с профессором школы инженерных и прикладных наук Гарвардского университета Лакшминараньяном Махадеваном (Lakshminarayan Mahadevan) не только построила математическую модель коллективного поведения черных муравьев-плотников, но и проверила ее экспериментально с помощью роботов. Результаты этой работы опубликованы в 11 номере журнала ELife за прошлый год.
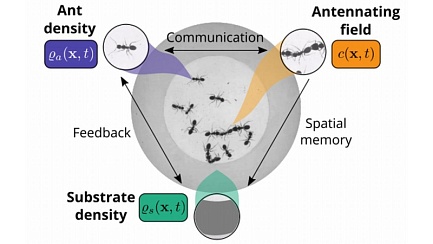
Первым делом исследователи изучили, как дюжина муравьев совместными действиями продырявливают изнутри емкость из агара, образующего плотный студень растительного заменителя желатина. Сначала они движутся в ней беспорядочно, исследуя ее границы усиками, а иногда их касанием общаются с собратьями. Спонтанно они собираются в группы. Если несколько муравьев начали прогрызать стенки «тюрьмы», то к группе присоединяются и другие. Таких групп несколько, муравьи между ними мигрируют. И постепенно образуется самая успешная и многочисленная, которая и проделывает проход.
Исследователи создали математическую модель успешности группы муравьев в заданных условиях. Изучая муравьев, ученые выявили два основных параметра задачи. Это сила взаимодействия особей и скорость прогрызания препятствии. Говоря кратко, успех приходил к тем, кто эффективно кооперируется и быстро роет.
Для проверки модели инженеры построили несколько муравьев-роботов, силу взаимодействия которых можно было регулировать. Они могли двигаться по стеклянной арене, окруженной тремя рядами магнитных цилиндров. Роботы сами имели магнитики, датчики освещенности и инфракрасные датчики контакта с предметами. Управляемый проектор света, освещающий снизу прозрачную арену, создавал световые следы роботов. Эти так называемые фотормоны имитировали феромоны муравьев.
Софт роботов содержал простые правила: двигайся по градиенту светового поля, избегай столкновений с себе подобными, хватай препятствия в областях сильной засветки, переноси их в области слабой. Эти правила и позволяли роботам быстро устранять препятствия и выбираться из ограниченного ими пространства. Меняя силу связи роботов, ученые генерировали предсказанные теорией режимы поведения роботов, в частности, меняли скорость преодоления препятствий.
Математическая модель оказалась очень гибкой, а ее простые алгоритмы, заложенные в роботов, очень устойчивы к ошибкам и сбоям. Она надежнее других программ, предназначенных для решения коллективных задач. Ее можно приспособить для решения многих других проблем, например строительства, поиска, спасения, защиты. Модель легко масштабировать на десятки и сотни роботов, использующих разные способы коммуникации.